

What separates a champion drone racing pilot from a novice? Better yet, what separates an average pilot from a novice? The obvious answer is of course skill and experience, but when you dig deeper and look at what skill and experience amount to, you find it really all boils down to lines – drone racing lines. I’ve seen extremely fast pilots consistently put up slow lap times simply because their lines were miserably inefficient, and I’ve seen novices beat the pants off of more skilled pilots simply because their lines were clean and tight. Even at the pro level, I would argue the difference between winning and losing comes down to the pilot who can find the perfect drone racing line and stick to it lap after lap, heat after heat. So with that said, if you haven’t read my previous article, “Drone Racing Practice Guide: 10 Maxims To Live By”, now is a good time skim it and review maxims 4,5, and 6 which paint broad strokes on the topic of racing lines
So how does one find the perfect drone racing line? Most pilots naturally draw inspiration from go-karting and Formula 1 racing. After all, concepts such as the geometric apex, early apex, and late apex are time-tested and scientifically proven tactics. So let’s briefly review them before I explain how they might be applied in drone racing.
Geometric Apex

The geometric apex, or traditional line, is a smooth and symmetric turn that maintains momentum, but sacrifices speed entering and exiting the turn. In short, it’s an effective and stable line but is not generally the fastest line.
Late Apex

Generally the fastest line through a corner, a late apex requires braking late and turning in late. This allows the driver to hit the gas early and maximize exit speed out of a turn and into a straight.
Early Apex

An early apex is generally considered an inefficient line and is the most common mistake among novice drivers. Beginners will often begin the turn too early, putting the car on a line that forces additional braking to avoid understeer. In other words, the driver will enter the corner faster but will exit much slower and lose considerable time.
This is all well and good, but unfortunately, these concepts don’t translate very well into drone racing. That’s probably why many pilots who have attempted to find the perfect drone racing line by starting with these principals have found themselves in a dead end. The differences between drone racing and car racing are simply too numerous. I wouldn’t dare to compare and contrast all of them, but we can at least cover the big ones.
Why Apexes Technically Don’t Apply to Drone Racing
First, race car drivers primarily need to manage the limits of tire grip and traction. FPV pilots, on the other hand, need to manage for vision and field of view. We can only see straight ahead, while drivers can look around a corner before turning the car in that direction. Moreover, racing drones can turn on a dime so maintaining a racing line is less about managing traction, and more about managing throttle and battery consumption.
Second, drone racing pilots don’t have boundaries such as a road that places constraints on their racing line. All we have are essentially a series of targets (gates) we need to hit, with our only boundary being the ground itself. Where we fly in between those gates doesn’t matter as long as it doesn’t cost time. As a result, the shortest line from point A to point B is usually the fastest line since there is no boundary dictating how wide or narrow an arc must be.
The last key difference is the fact that drone racing pilots operate on a three-dimensional course. Duh! That means gravity has a much greater influence on a pilot’s line when the quad is climbing or descending rather than simply turning left or right. Gravity and a pilot’s only natural boundary, the ground, are the only two things that make concepts like the geometric and late apex applicable to drone racing. The best example of that can be seen in the Split S turn.
A Split S turn is roughly equivalent to a 180° hairpin turn in F1 racing. It differs from race cars only in that the idea behind the Split S maneuver is to use gravity to gain speed through the turn and accelerate even faster than one normally would.
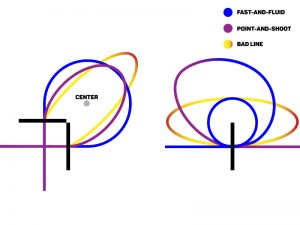
 While the geometric apex (dotted line) is a tighter line that maximizes gravity’s effect on the quad and maintains a fast average speed, the late apex (yellow line) is a longer, flatter line that allows the pilot to get back on the throttle sooner and pick up time.
While the geometric apex (dotted line) is a tighter line that maximizes gravity’s effect on the quad and maintains a fast average speed, the late apex (yellow line) is a longer, flatter line that allows the pilot to get back on the throttle sooner and pick up time.
When comparing the two images above, you might notice the dotted line (geometric apex) is slightly shifted up in the Split-S since pilots will generally aim for the center of a gate. The apex of the two lines become centered on one another because there is no road boundary in drone racing. As a result, the concept of a “late apex” becomes meaningless. That’s why I would argue there are really only two types of lines (styles, if you will) in drone racing. I’ll call them point-and-shoot lines, and fast-and-fluid lines.
Point-and-Shoot VS Fast-and-Fluid
Like the late apex, point-and-shoot lines maximize speed on entree and exit of a turn but sacrifice time when changing directional momentum. Conversely, fast-and-fluid lines maximize average speed throughout a turn at the expense of gate visibility. So which is style faster? Honestly, it’s debatable as long as the line followed in either case is a symmetric, parabolic line. There’s definitely a time and place for each, so let’s take a look at a few obstacles commonly seen on MultiGP tracks to understand the pros and cons of each style.
Split-S and 180° Turns

Because one style isn’t inherently faster than the other, the key to a fast line really is in maintaining a parabolic line. That is, the ideal race line will always form a symmetric parabola. Whether it’s a fast-and-fluid line or a point-and-shoot line, either line will get you through the turn as quick as possible. Therefore, choosing one line over is often a matter of weighing the cons of each line.
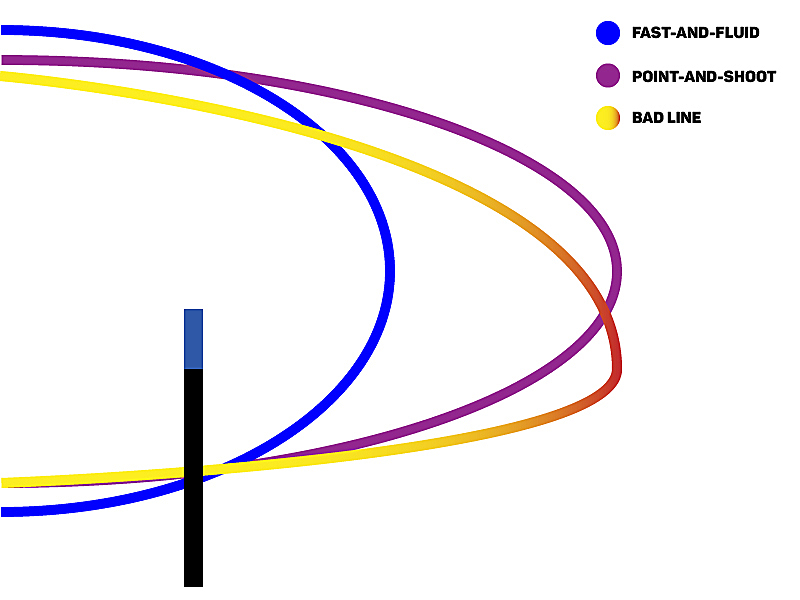
For example, if you push the throttle too hard on a point-and-shoot line through a Split-S, you can easily find yourself on a bad line like the one depicted here. This type of asymmetric line is all too common on Split-S turns. It happens when a pilot eases off the throttle too much when rolling the craft. The craft quickly loses altitude making a steeper entree angle. As a result, the pilot must punch the throttle hard to keep from bottoming out and all forward momentum is lost. This causes the quad to “hang out” in front of the gate (depicted by the red gradient) and can cost a pilot a lot of time.
90° Turns

Ninety-degree turns are everywhere, and although they’re one of the most simplistic features on a track, they’re anything but simple to hit at speed. If a pilot turns too late on a point-and-shoot line, forward momentum must be killed completely with a hard roll before pitching forward and hitting the throttle again. Precious seconds are spent hanging out in front of the gate. Conversely, a fast-and-fluid line keeps the gate out of a pilot’s FOV longer. Turning too sharply to compensate is an easy error to make. Not only does the pilot end up with a narrower opening since he’s entering the gate at an angle, but he may also have a poor setup for the next gate.
270’s and Ladders
Have you ever tried to draw a perfect circle? Did you know the World Freehand Circle Drawing Championship is a real thing? Yeah. Me neither. It’s probably not as entertaining as drone racing, the point is perfect circles are really friggin’ hard to do. That’s precisely why 270° turns and ladder gates are so difficult. Even novices can get through these gates, but only pros can get through them quickly and efficiently.
The same principals apply to the “offset 90 gate” when making a 270° turn as they do with any other turn. A fast-and fluid line can be just as fast as a point-and-shoot line provided they are symmetric and have the same center point. It should be noted, however, that a fast-and-fluid line is technically not possible. As we know, perfect circles are hard. They’re even harder when you’re entering the top of an offset 90 gate at full throttle. Inevitably, a pilots line will get blown out a bit and become more egg shaped. The trick to finding the perfect line is in ensuring that egg doesn’t get blown out too much. The narrower your ellipse is, the more momentum you lose when changing direction, and the more time it will cost you. So best practice is to try for a fast-and-fluid line and accept the fact that you’ll probably get an egg. But, shooting for a perfect circle helps keep your line tight, and the closer you can get the center point of your line to the corner of the gate, the faster your line will be.
{kind=link}
Ladder gates< are a slightly different story, however. The best line will start out as a point-and-shoot, blowing out the first turn a bit due to a high entree speed. Eventually, by the time you get back around to the middle of the ladder, enough speed will have been cut to tighten up the line and morph it into a fast-and-fluid line. From there, your line becomes a descending orbit until you get to the bottom of the ladder. Also know that because ladders have three gates in succession, a bad line (I call them “pills” due to their shape) through each tier of the ladder can cost a ridiculous amount of time.
{kind=link}
Everything Else
These concepts can be applied to pretty much every other feature you’ll encounter on a track. For example, corkscrews or “tootsie rolls” like the one on the MultiGP regional qualifier track follow the same principals as a ladder gate and Split-S. Keep a nice tight circle going over the barrier and through the second gate. Avoid “pills” and don’t come down too steep on the second gate or you’ll find yourself hanging out in front of it.
The only obstacles I can think of to which these concepts don’t apply are those that don’t require full turns, rather they require a bit of pitching or rolling. Slaloms come to mind here. Since the fastest way from point A to point B is a straight line, the straighter you can keep your line through a slalom, the faster you’ll be.
A Few Caveats and Tips
As I said before, finding the perfect line boils down to style preference. Personally, I generally fly fast-and-fluid. Keeping my turns as circular as possible helps keep me from blowing out turns and hanging out in front of gates. Plus, since fast-and-fluid often feels slower than point-and-shoot – that is, it’s perceptually slower but not actually slower – I stay consistent and don’t crash very often. I can trust my line rather than having to rely on my reflexes, which if I’m honest, are only getting slower with each passing year. But fast-and-fluid isn’t necessarily better or faster than point-and-shoot. It’s just different. As long as both lines have the same center point, they will be pretty close to equal. Only when one center point is further out than the other, making a wider circle, ellipse or parabola, will one line be faster than the other.
Lastly, know that the feature immediately following a turn can and should tweak your line. It’s always best to be thinking one gate ahead, even better if you can line up the next gate before entering the first. Doing that can change a fast-and-fluid line into a point-and-shoot so the gate can be taken at an angle, or it can take a point-and-shoot line off the table completely.
Application IRL
To see how these concepts and caveats work out in real life, check out the DVR footage below.
The track these two pilots are flying, affectionately titled “What Will They Do Next?” in reference to Colorado’s T1 MultiGP chapter The Other Guys, is a great case study for racing lines due to its high altitude features, 270° turns, and hairpins. It’s also wicked fun and available on Velocidrone. Just search for “TOG_WWTDN” by OhGeez! on the empty scene.
Both pilots in the DVR use a mixture of the two styles, but the pilot on the left clearly favors fast-and-fluid, while the pilot on the right goes balls to the wall with point-and-shoot lines. Both pilots hit 7 laps on the RQ track and trade places often on a good track run. Let me know which pilot (fast-and-fluid or point-and-shoot) you think is the faster pilot in the comments.
Mepsking FPV Forum, where you can learn everything about drone and flying skills. Check mepsking store if you want to buy drone parts.